基于可见光信号的被动式标签位置感知和姿态估计¶
引言¶
随着通信和感知技术的发展,物联网受到了学术界和工业界以及国家政策层面越来越多的关注。物联网技术被运用到各行各业中,帮助人们在采集环境信息、控制智能设备等过程中提高自动化水平,减少人工操作,实现生活水平、生产效率和经济效益的多重提升。物联网作为沟通物理世界和数字世界的桥梁,使人类世界的生产生活方式发生了极大的变革,目前物联网作用的发挥仍然主要依赖于接入其中的大量智能化终端设备。这些终端设备利用自身的感知能力采集环境中的参数并通过无线网络将数据发送给网关节点,或者是接收来自网关节点的命令而进行相应的操作。大量的非智能化的设备和物体因为不具备通信或计算能力而无法接入到网络中。例如,智慧仓储中的货物箱、无人超市中的商品、工厂自动化流水线上的工件等。因为这些普通的物体无法直接接入物联网,其状态和身份无法被控制系统得知,使得这些场景依然依赖于一定的人工参与,智能化水平无法进一步提高。或许当人类的科技和生产力得到极大发展时,可以考虑将所有的设备和物体都进行智能化改造,来使其接入到网络中。但在现阶段将大量普通物体进行智能化改造的成本过于高昂。
为了解决将普通物体接入到物联网中的问题,科研工作者们进行了多方面的努力,创造出了多种类型的标签,用于普通物体的身份标记、位置姿态识别等。RFID标签目前在物联网中应用十分广泛。在仓储、物流等场景RFID标签为普通物品提供身份标记服务。安装在车辆上的RFID标签可以支持高速路口车辆身份识别和不停车收费。一些可植入在动物身上的标签可用于宠物和牲畜的身份认证。RFID技术的身份编码能力在被广泛应用的同时,其定位能力也吸引了很多研究者的兴趣。RFID天线所发出的射频信号经由RFID标签反射后回到阅读器后,信号的相位会受到标签与阅读器距离以及标签姿态的影响。一些研究工作通过分析返回信号的特征,实现了对RFID标签的定位或姿态识别。使得携带了RFID标签的普通物体位置和姿态可以被阅读器感知。随着摄像头的普及,大量的视觉标签被设计出来用于SLAM、虚拟现实(VirtualReality,VR)、增强现实(AugmentedReality,AR)、以及普通物体姿态识别等场景。这类视觉标以二维码的形式被打印在平面上。相机对视觉标签拍照后,可借助相机内参数和标签在照片上的像素位置,利用相机成像的几何模型得到标签相对于相机的位置和姿态。
RFID标签和视觉标签的出现,实现了非智能化物品的身份识别与位置检测的功能,使得没有通信能力和计算能力的普通物体也能够接入到物联网中。但已有的这些方法仍然有一定的局限性。RFID标签的读取需要特制的阅读器,阅读器的成本往往比较高。而RFID的读取距离一般只有几米,用于定位时所支持的距离只有大概2米。若要在较大的范围内使用RFID标签对物体进行定位则需要部署大量的阅读器,或是使用移动的阅读器不停地在空间中来回运动扫描各个标签的状态。视觉标签使用十分常见的相机作为读取设备,许多应用场景中本身就部署有大量的监控摄像头,可以直接被用于视觉标签的定位系统中。但视觉标签定位技术依赖于相机成像的几何模型,需要预先测量包括焦距、畸变、像素大小等相机内参数。因为焦距通常是以毫米为单位,相机的标称焦距往往和实际焦距不一致,需要通过相机标定的方式获取准确的相机内参数。许多相机和监控摄像头都带有变焦功能,每次变焦之后相机内参数改变就需要对相机进行一次重新的标定获取新的相机内参数。这些限制局限了视觉标签的应用范围。
为了解决这些问题,本节向读者介绍一种基于各向异性光学材料的显色偏振效应的被动式光学标签,无须特殊定制的阅读器,使用随处可得的相机和监控摄像头就可以实现用于普通物体的位置感知和姿态估计。该标签由偏振片、各向异性光学材料和反光材料组成,完全不需要消耗能量。被动式光学标签的反光层将来自摄像头方向的光线原路反射回摄像头,使得摄像头接收到标签上的显色情况。相比于视觉标签,基于显色偏振效应的被动式光学标签无须使用焦距等相机参数信息。仅利用标签在照片中显示出的颜色以及标签在照片中的形状和相机投影关系模型即可实现标签的位置感知和姿态估计。
利用上一节中显色偏振光学标签的定位原理,仅可以得到相机在光学标签坐标系下的位置,而无法获取相机的姿态(即相机坐标系各轴的朝向信息)。本节介绍的工作基于由标签颜色得到的相机在标签坐标系下的位置,结合相机成像模型中的投影几何关系,建立空间中的物点与照片上像点之间的投影模型。利用光学标签在相机“像平面”上的像点和光学标签在标签坐标系下的“物点”之间的投影关系,在相机坐标系与标签坐标系之间建立联系。根据标签坐标系与相机坐标系之间的转换关系,经由坐标系转换计算得到标签在相机坐标系下的位置和姿态信息。
本节介绍的被动式定位标签用成本低廉的透明胶带、偏振片和反光材料制作被动式光学标签,使用智能手机上的相机对光学标签进行拍摄,并得到被动式光学标签的位置和姿态。这项研究工作的贡献主要包括以下三个方面:
- (1)提出了被动式光学标签位置感知和姿态估计系统。该系统可以为普通物体提供简便易得的定位和姿态估计服务,使得大量没有计算能力和通信能力的设备能够接入到物联网中。
- (2)结合显色偏振光学标签对相机的定位能力和相机成像原理设计了一种全新的不需要相机内参数的定位和姿态估计方法。
- (3)用大量的实验对系统在不同条件下的性能进行了验证,实验结果表明本系统可以利用商用摄像头对被动式光学标签实现中值误差为1∘的姿态估计、中值误差为1.6cm的二维定位、以及中值误差为17cm的三维定位。
被动式光学标签设计¶
在主动式光学定位标签设计中,所使用的光学标签要求光源和接收端处在标签的两侧,才能在接收端捕获到显色偏振干涉后的颜色。而且显色偏振结果直接受到光源光谱的影响。当光学标签被粘贴到物体表面时,则无法保证物体表面所反射的环境光的光谱仍然与白光光谱相近。许多物体的表面都是带有颜色或花纹的,当光学标签粘贴到红色的物体表面,那么作为显色偏振系统光源的则是由物体表面所反射的红色的光线。物体表面颜色对光源光谱的干扰会直接导致显色偏振的显色结果发生变化,造成系统无法定位的后果。且物体表面反射的环境光线往往非常微弱,即便是白色的物体表面为显色偏振系统提供光谱接近白光的光源,其亮度也极其有限,会使得相机因为捕获到的颜色过于暗淡而无法准确地获取到显色的色相。
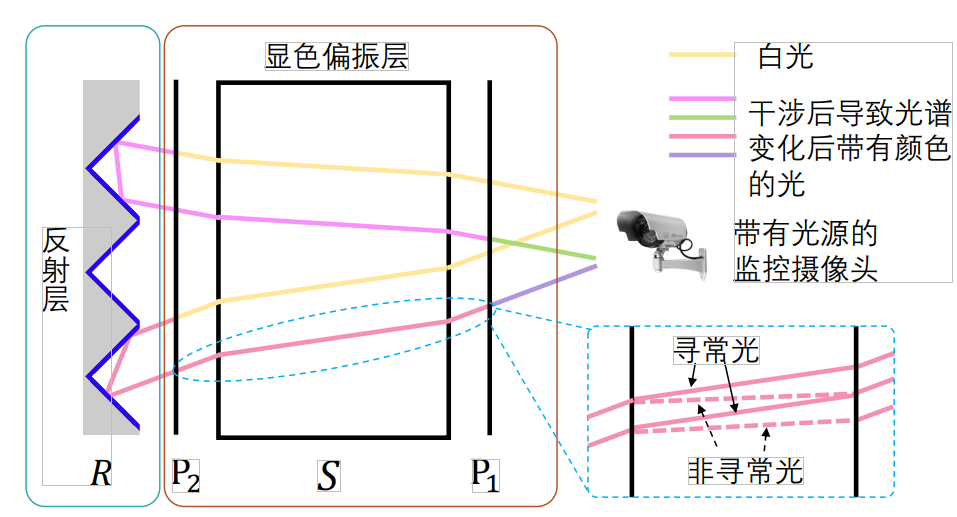
为了解决光源的问题,被动式光学定位标签引入了一种能把光线反射到光源方向的反光材料,将反光材料与显色偏振膜片结合构成了纯被动式的光学膜片,如上图所示。该反光材料的反射原理类似于自行车灯和交通反光材料,可以把光线以平行于入射方向的方向反射出去。摄像头所携带的光源发出的白光首先经过显色偏振层,两束出射光线发生干涉而产生颜色。干涉后带有颜色的光继续传播到达反射层,经由反射层反射后光线沿入射方向返回。再次经由显色偏振层后发生第二次干涉,光谱再次改变后到达摄像头,被摄像头捕获。
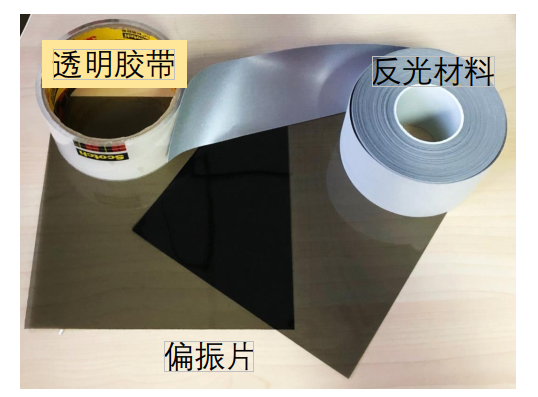
使用下图所示的胶带、偏振片和反光材料制作被动式显色偏振膜片。无须任何的电路部分和供电模块,完全实现真正的被动式。由于显色偏振效应对光线的频率选择特性与光线入射方向相关,且被动式显色偏振膜片的反射光线与入射光线方向平行,所以被动式显色偏振膜片的显色结果与入射光的方向相关,即与光源和相机相对于显色膜片的方向有关。
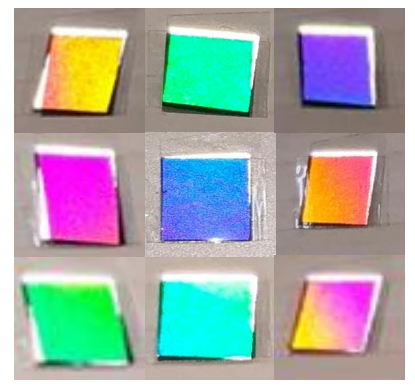
下图是自带有光源的相机从不同的角度拍摄被动式显色偏振膜片得到的图片,可以看出被动式显色偏振膜片的显色结果与相机相对膜片的观察方向相关。
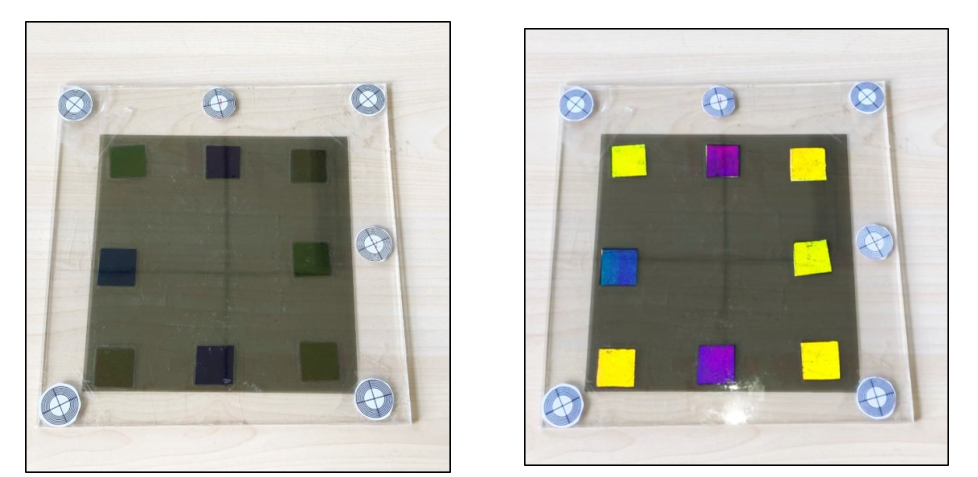
将多个显色偏振膜片集成到同一个平面上,得到如下图所示的被动式光学标签。该标签在没有光源为其提供入射光线的情况下,各光学膜片呈现较为暗淡的颜色,如图左所示。当摄像头一侧的光源打开,光源发出的入射光线到达反射层后原路返回到摄像头,则会使被动式标签上的各光学膜片上呈现出明亮的显色结果,如图右所示。
基于此,通过获取被动式光学标签反射光颜色和相对位置,我们可以计算出标签相对于摄像头的位置和姿态信息。
参考文献¶
- Lingkun Li, Pengjin Xie, Jiliang Wang. "RainbowLight: Towards Low Cost Ambient Light Positioning with Mobile Phones", ACM MOBICOM 2018.
- Pengjin Xie, Lingkun Li, Jiliang Wang, Yunhao Liu. "LiTag: localization and posture estimation with passive visible light tags", ACM SenSys 2020.